Az informatika fejlődésével egyre több munka vált elvégezhetővé otthonról, és egyre többen kedvelik is az otthonról dolgozást.
A probléma, hogy az otthonról végezhető munka jelenleg szinte kizárólag a fehérgalléros réteg kiváltsága, és ha valakiket, hát a gyári munkásokat egyáltalán nem érintette. Ez azonban hamarosan megváltozhat, mégpedig a virtuális valóság segítségével.
Az MIT ugyanis sikeres eredményeket ért el egy új módszer kifejlesztésével, mely lehetőséget ad gyári robotok kezelésére a virtuális valóság, jelen esetben az Oculus Rift használatával. Az elgondolás alapvetően nem új, eddig azonban kétféle modellel próbálkoztak, és egyik sem volt igazán tökéletes.
Az első a közvetlen modell, ami a lehető legegyszerűbb módon a robot által "látott" képet közvetítette a virtuális valóságos szemüvegre, ez azonban a késleltetés miatt sokaknál hányigerhez vezetett, és persze kizárólag azt láthattuk, amit a robot is.
A másik a kiberfizikai modell, aminek keretein belül a robot egy virtuális mását és annak környezetét látjuk, a virtuális robot pedig a valódi robot irányítja. Ehhez azonban rengeteg adat állandó feldolgozására van szükség, ráadásul a robot környezetét is ennek megfelelő, speciális módon kell kialakítani, ami persze további költségeket jelent.
Az MIT által kifejlesztett új rendszer neve CSAIL, valahol a kettő között helyezkedik el.
A kutatók a homonkulusz elvet vették alapul az elgondolásukhoz, aminek a lényege jelen esetben az, hogy az agyunkban van egy másik, kicsi ember, ami értelmezi számunkra a szemünk által látott információkat, és irányítja a cselekedeteinket. Ez pedig egy robot esetében tulajdonképpen nem is hangzik túl nagy hülyeségnek:mi történne, ha mi lehetnénk ez a kis ember a robot agyában?
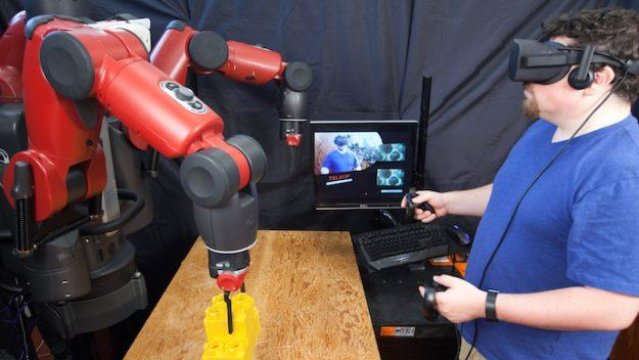
Ha az túl furcsán hangzik, akkor egyszerűbben megfogalmazva olyan az egész, mintha egy virtuálus irányítóteremben ülnénk, ahol egy-egy kamerán keresztül láthatjuki a teszteléshez használt, Baxter névre keresztelt robot kezeit, egy harmadik kamerán a munkaterületet, valamint két furcsa, kék virtuális golyót birizgálva irányíthatjuk a robot karjait az Oculus Rift kontrollerének segítségével. Mindez a gyakorlatban így néz ki:
Ráadásul az MIT rendszeréhez nem szükséges sem speciális környezet, sem pedig brutálisan erős hardver. Míg más módszerek általában úgy dolgoznak, hogy a kamerák kétdimenziós képéből először felépítenek egy teljesen 3D-s virtuális világot, és ezt jelenítik meg a virtuális valóságos szemüveg kijelzőn, addig a CSAIL egyszerűen a kétdimenziós képet vetíti egy-egy szemünknek, amiből aztán az agyunk már össze tudja rakni 3D-sre.
Az éles tesztek pedig egyelőre bíztatónak tűnnek: az MIT által kifejlesztett rendszer az esetek 95%-ában jobban működött tárgyak megfogására és odébb helyezésére, és a feladatokat 57%-kal gyorsabban lehetett elvégezni, mint az eddig használt módszerekkel.
A tesztek során először olyan egyszerű feladatokat végeztek el, mint csavarok és huzalok felvétele és odébb rakása, majd építőkockák felvétele és egymásra helyezése. Nem túl meglepő módon egyébként a rendszer irányításában kiemelkedően jól teljesítettek azok, akik rendelkeztek videojátékos tapasztalattal.
A fejlesztők ki is emelték, hogy a CSAIL segítségével egyre több, munkanélkülivé váló gamer találhatna állást magának, hisszen ezzel tulajdonképpen "játékossá" tennék a gyártási folyamatot.
Amennyiben tetszett a cikk, illetve más hasonló híreket is szívesen olvasna, itt lájkolhatja oldalunkat!
Kapcsolódó anyagaink:
TELJESEN MEGVÁLTOZIK A MUNKA VILÁGA, LESZNEK SZAKMÁK, AMIK VÉGLEG ELTŰNNEK
EZEKRE A SZAKMÁKRA NEM LESZ SZÜKSÉG A JÖVŐBEN
A KÖZELJÖVŐBEN EZEK A SZAKMÁK SZŰNNEK MEG
Forrás - Nyitókép: MIT CSAIL
TOP 5













